Dentro de la seguridad de maquinaria, para deshabilitar el motor existen métodos tradicionales que se realizan mediante conectores electromecánicos o relés de seguridad. Cumplen su función, pero presentan varias limitaciones técnicas y de seguridad:
- Falta de fiabilidad por desgaste y fallos mecánicos
- Riesgos eléctricos (arcos, contactos soldados)
- Complejidad y coste elevado para lograr redundancia
- Limitaciones en velocidad de reacción y diagnóstico de fallos
Pero, ¿cuáles son los métodos tradicionales para deshabilitar el motor?
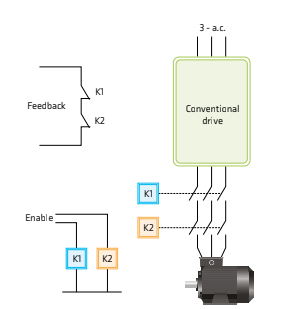
1.- Contactores
En esta figura vemos un método clásico con contactores en serie (K1 y K2) para cortar la alimentación del motor. En este tipo de conexiones, es obligatorio tener doble contactor con realimentación (feedback), ya que un único contactor podía quedarse pegado (fallo peligroso).
El lazo de control supervisa ambos contactores, de modo que si uno falla, el otro impide que el motor genere par.
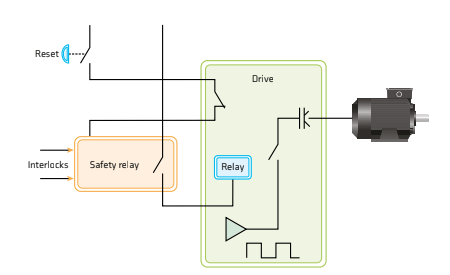
2.- Variador con relés de seguridad con contactos guiados
En la figura podemos ver un diagrama de conexión que cuenta con un drive (variador), relé de seguridad con contactos guiados, circuito de enclavamiento (relay interlocks) y función de reset para comprobar el estado antes de rearmar. En este diseño:
- El relé de seguridad interrumpe la alimentación de la etapa de control del variador, inhibiendo la generación de par en el motor.
- El contacto auxiliar mecánicamente acoplado se emplea como señal de realimentación (feedback), permitiendo verificar que la orden de apertura se ha ejecutado correctamente y detectar fallos como la soldadura de contactos.
- La función de reset fuerza la validación de la condición de seguridad antes de permitir la reactivación del sistema, evitando arranques intempestivos tras una parada.
El problema de este sistema, es que los relés pueden fallar y dejar pasar corriente. Por eso en estos sistemas antiguos era necesario un contactor adicional externo para asegurar la parada del motor en caso de fallo.
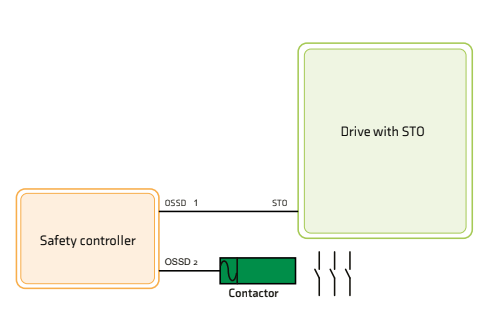
Función STO integrada en variadores modernos
La función STO (Safe Torque Off), mediante un diseño cuidadoso de circuitos electrónicos a prueba de fallos, elimina los modos de fallo equivalentes a un contactor o relé pegado. De este modo no es necesaria la realimentación adicional para alcanzar los niveles de seguridad SIL 3 o PL e.
Cuando se activa, el STO deshabilita la salida de potencia del variador, impidiendo que el motor genere par. En otras palabras, garantiza que no se produzcan movimientos no deseado en la máquina, en conformidad con la norma IEC/EN 61800-5-2. Existen distintos diagramas de conexión que muestran las diferentes formas de implementar esta función según las necesidades de seguridad de cada aplicación:
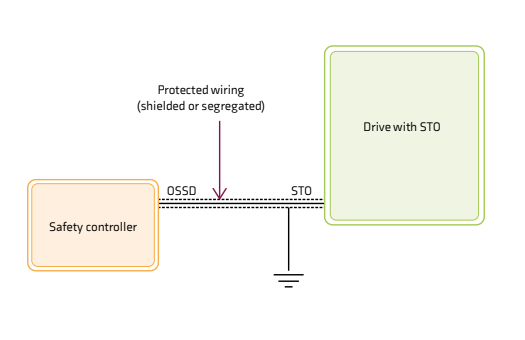
Single channel.
Se muestra un único lazo de control del STO. Señal sencilla, cuando el circuito se abre, el STO se activa y el motor queda sin par.
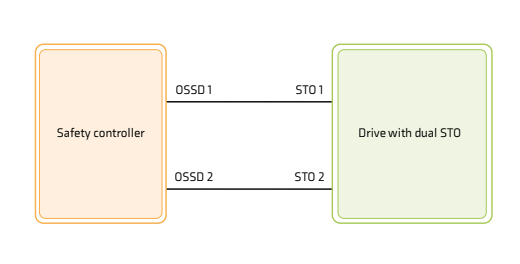
Dual channel.
Se representan dos entradas STO (STO A y STO B). Ambas deben estar en estado válido para que el motor se habilite.
Dual channel con relés de seguridad guiados.
Se ven claramente los relés de seguridad intercalados en cada canal. Se asegura redundancia y detección de fallos en contactos.
Diferencias clave entre método tradicional y función STO.
En el método tradicional con contactores había riesgo de arcos eléctricos, desgaste mecánico, fallos de contactos soldados. Con la función STO, se evita todo esto.
El STO se explica dentro de los requisitos de seguridad de la Directiva de Máquinas y se relaciona con normas de seguridad funcional como la ISO 13849-1 e IEC 62061. Además, como hemos visto, se puede implementar en diferentes configuraciones que permiten alcanzar niveles de integridad SIL 3 / PL e según ISO 13849-1 e IEC 62061.